Viral Vision Capstone Project
In the summer of 2020, when I started my Capstone class at Northeastern, my group decided to address a challenge of the ongoing pandemic. Namely, we decided to address challenges with enforcing social distancing between people in public places such as malls or schools.
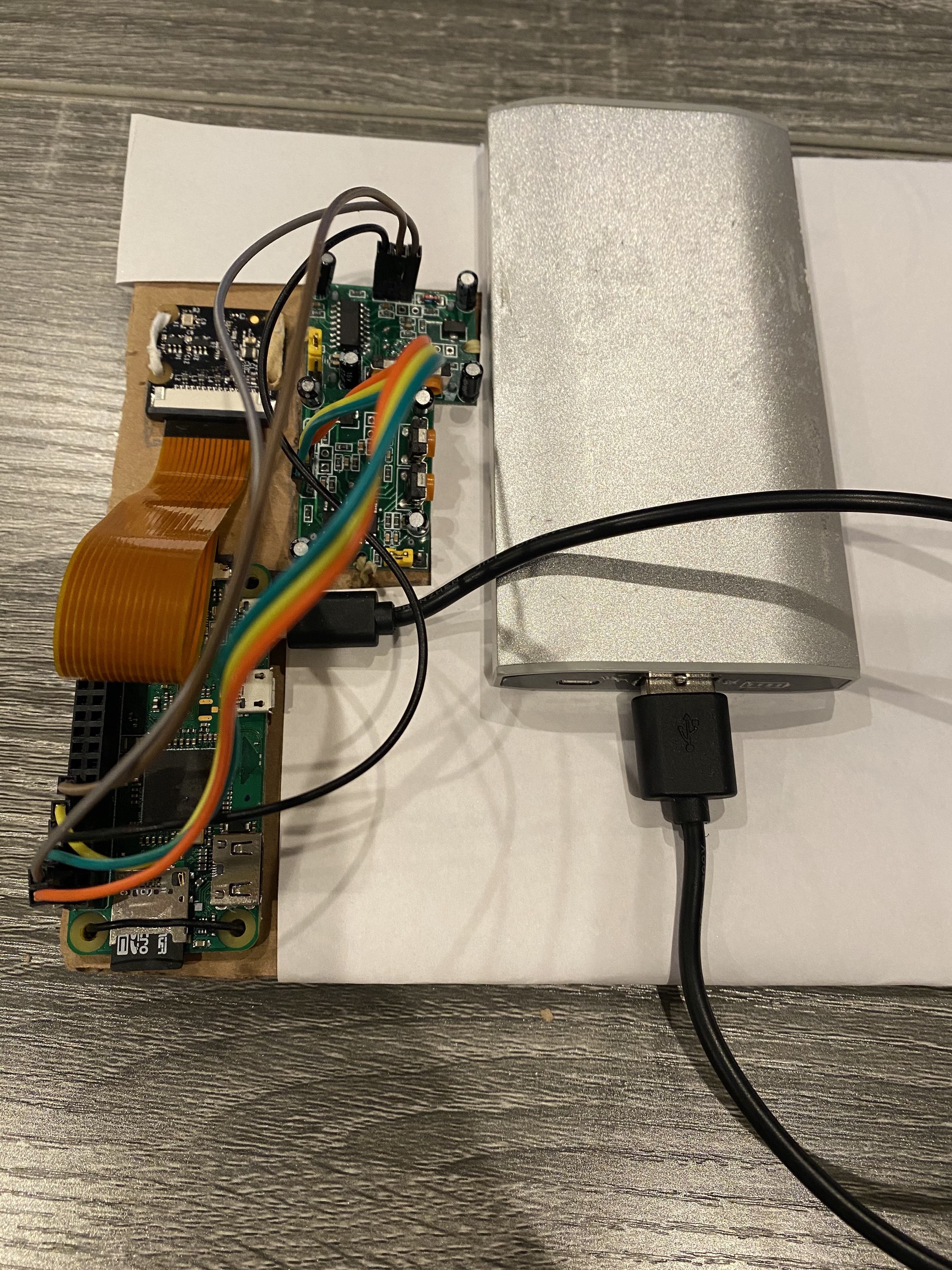
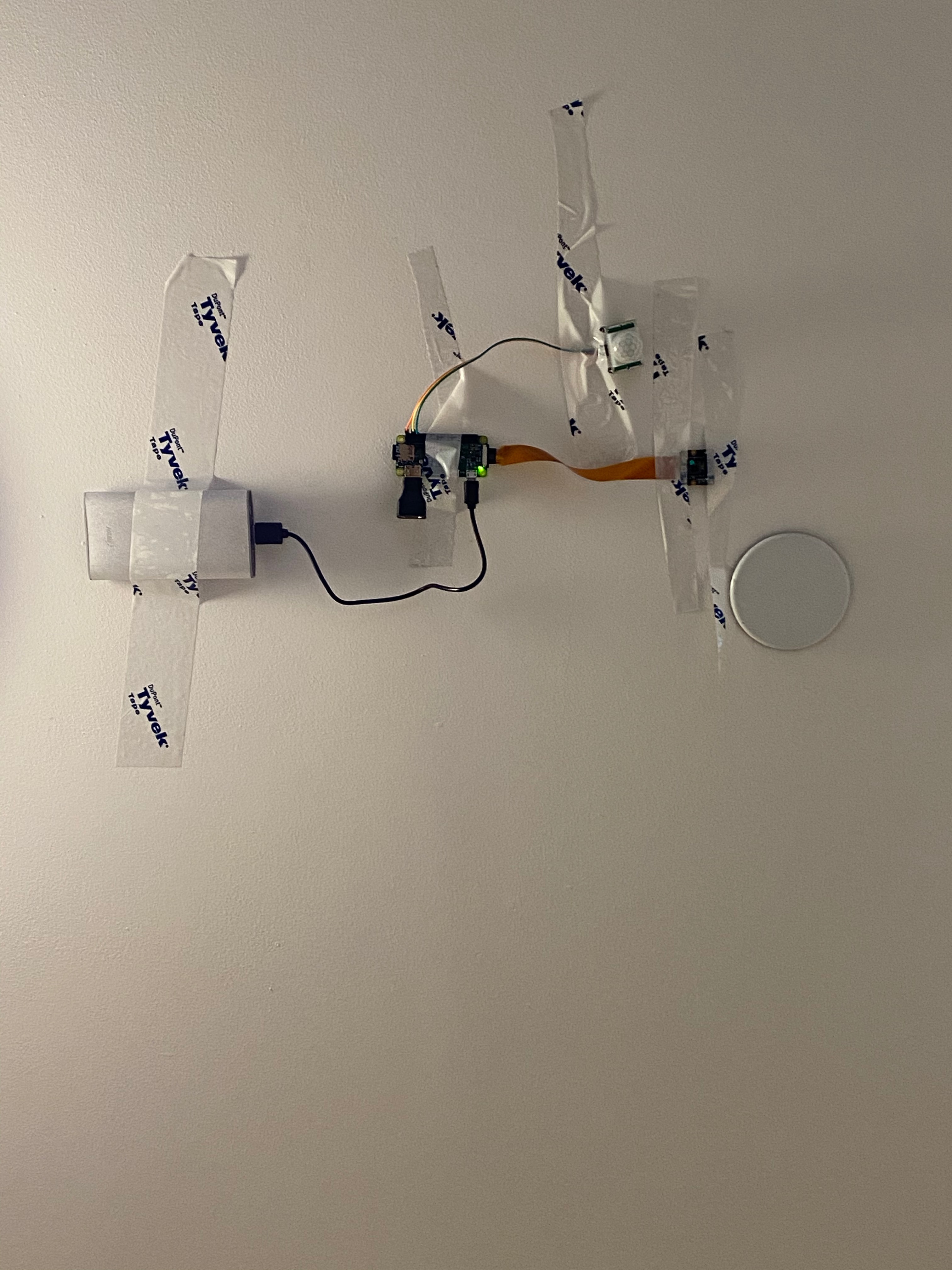
We titled our Capstone project Viral Vision, and used a Raspberry Pi Zero to collect overhead images of a space and then use image processing and machine learning to teach a model how to identify violations of the 6 feet rule. The goal was to have a model which could predict when and where these violations would happen, based on the velocity of people traveling through the space, as well as on behavior models accounting for obstacles, points of interest, and entrance/exits within the observation area.
My role on the project consisted primarily of handling the hardware, including the Pi Camera, motion sensors, and the Pi itself. Additionally, I managed the initial image processing using various image processing python libraries.
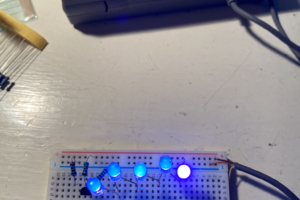
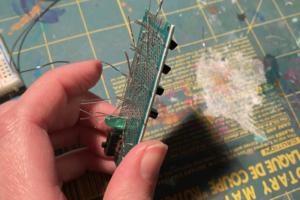
Electroplated Infinity Mirror Hairstick
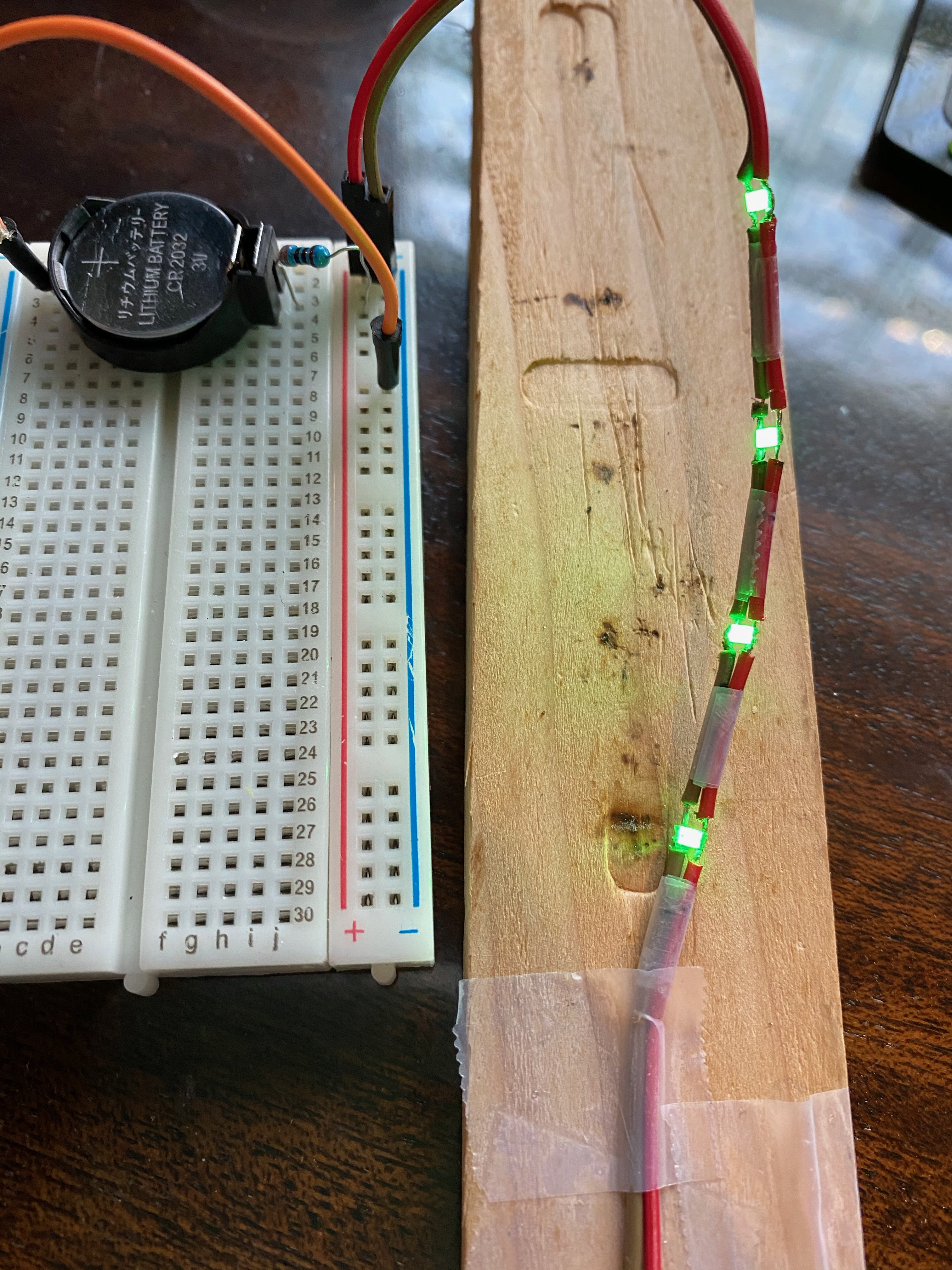
For this project, I initially wanted to create a hairstick with a custom printed circuit board on the top. However, I decided part way through the design process that an infinity mirror would have a more sleek and polished look.
I designed the disk where the LEDs are to be 3D printed and then electroplated the whole thing with copper to provide the somewhat rustic finish to the design.
My write up of the project won First Prize in the Instructables Jewelry Contest.







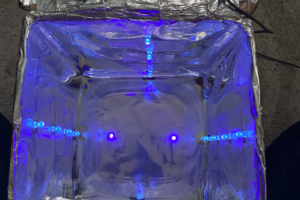



UV Resin 3D Printer Curing Chamber
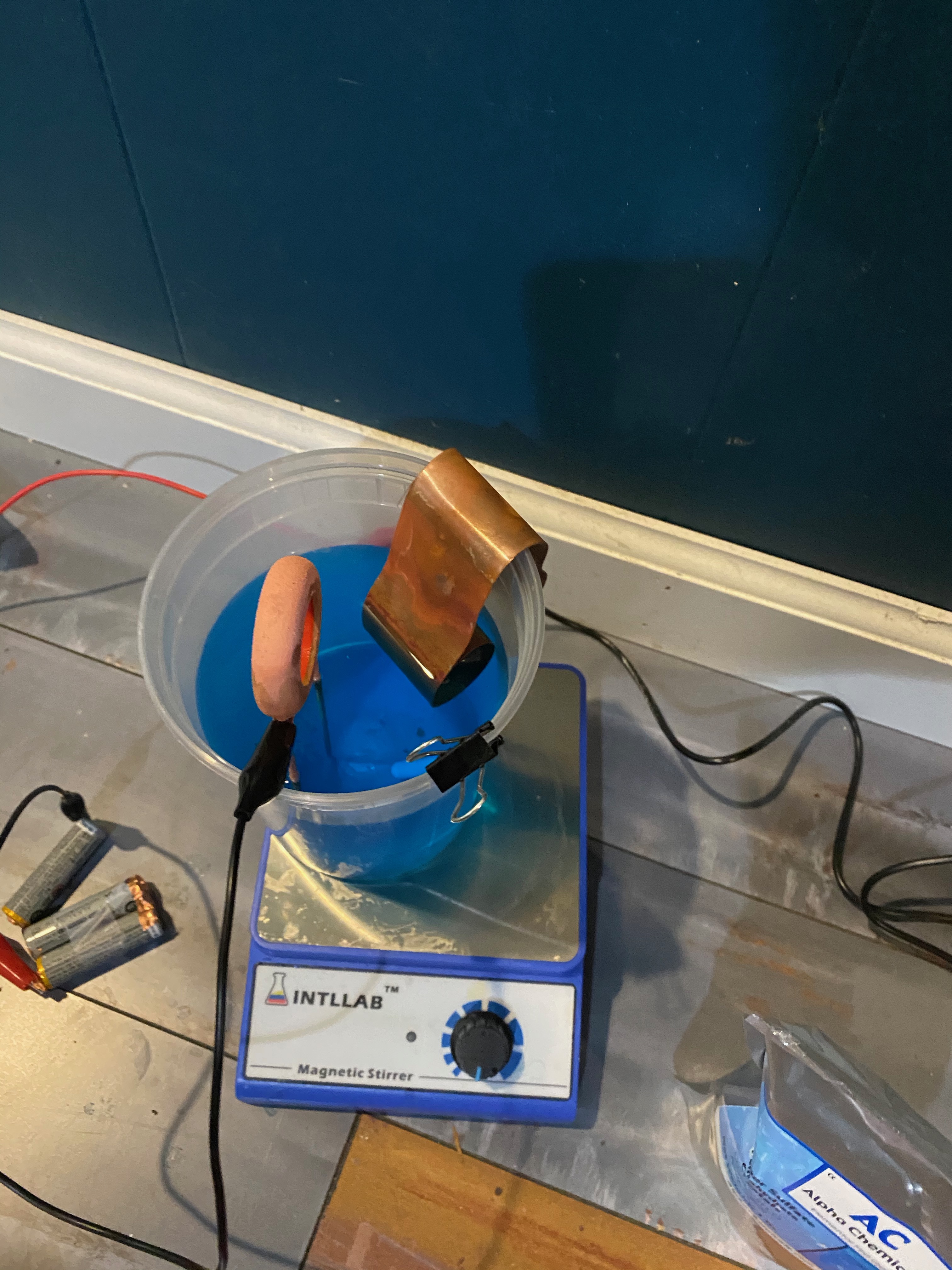
For a graduation present, I received the exciting gift of a resin 3D printer to make art with. The printer uses an LCD screen to build up the cured layer, over many very thin layers. Prints made with resin printers should be cured with ultraviolet light to harden the plastic fully and finish the printing process. Additionally, I was excited by the idea of being able to create larger scale prints than my print bed would allow by printing smaller pieces and then attaching them by curing them together in a UV bath.
While many of these projects exist, I wanted to create one out of simple UV LEDs to cut down on cost and to put the engineering design skills I learned in school to good use.
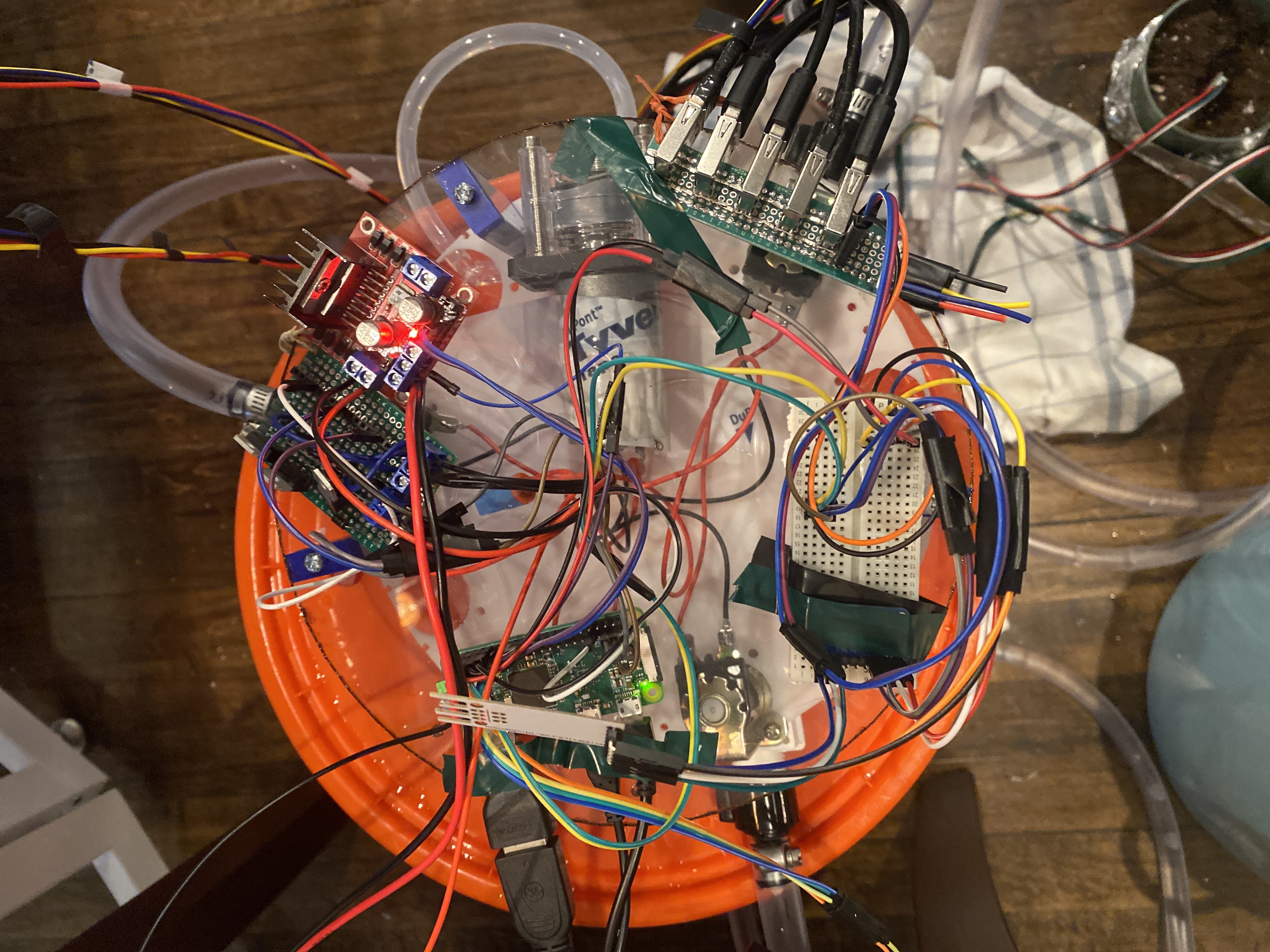
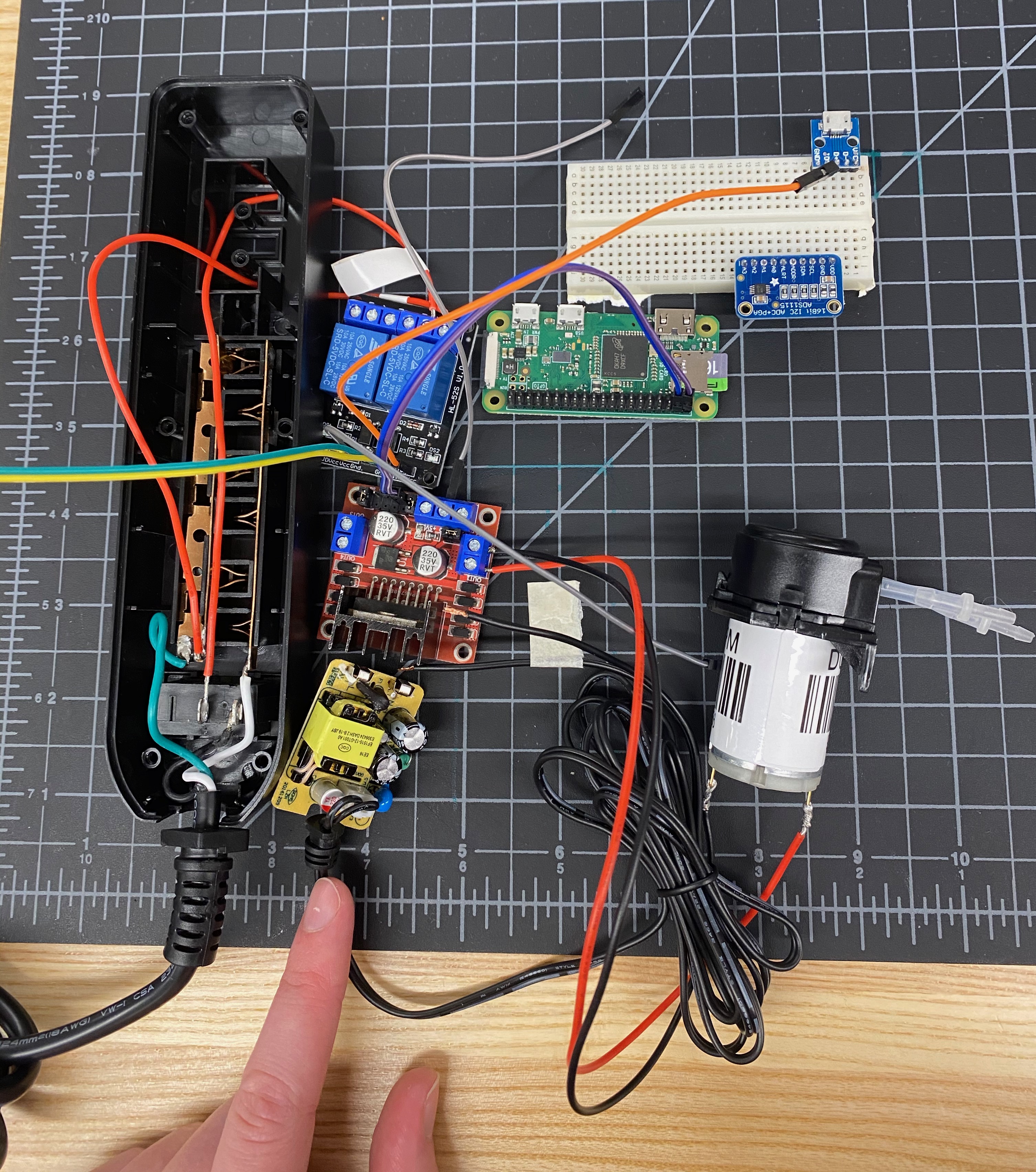
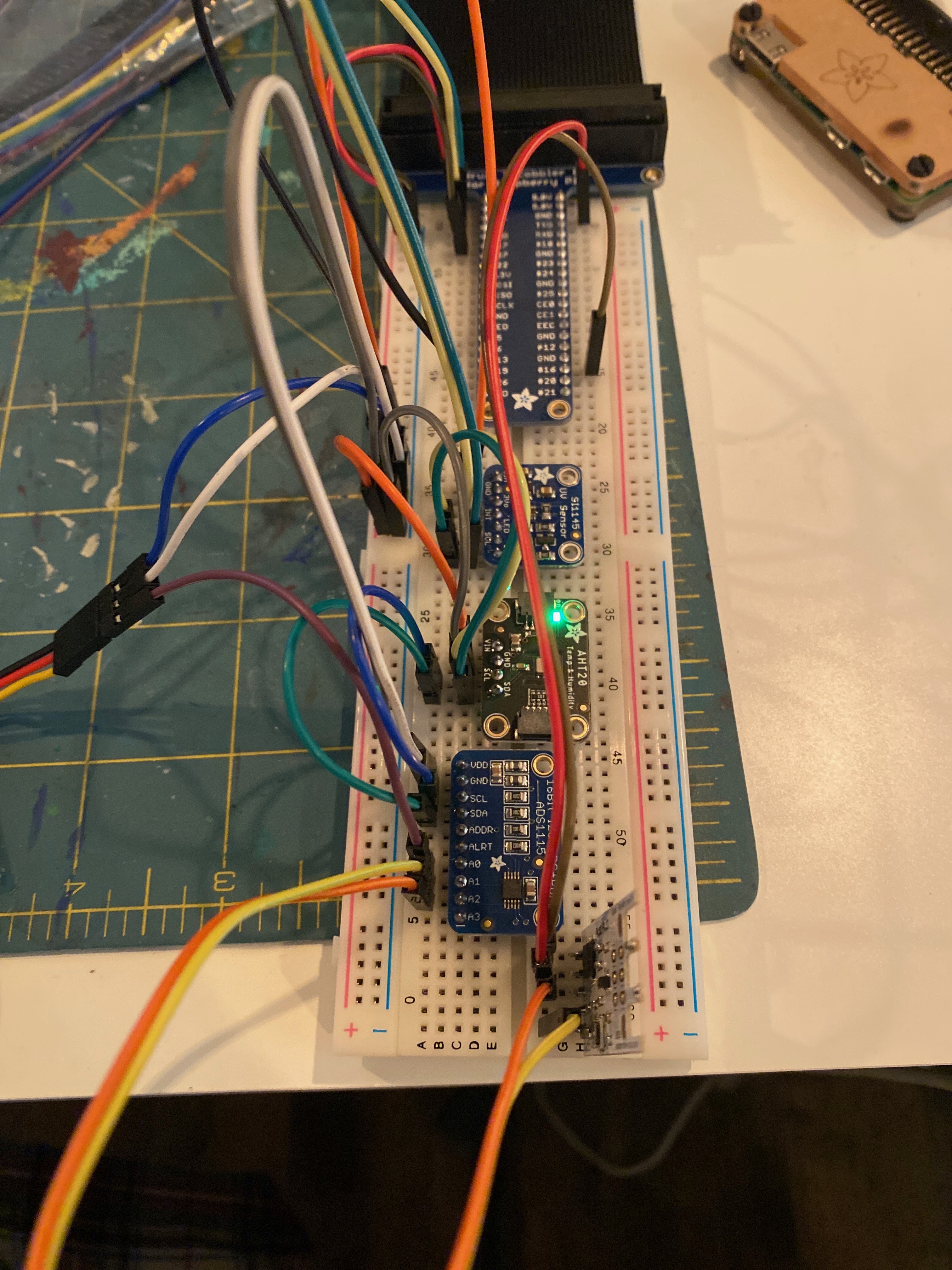
Grow Organic with IoT
As a member of a small team of student designers and engineers at Northeastern’s student-led product development studio, Generate, I worked to prototype a automated plant care system.
The system included various plant care sensors: soil moisture, light levels, temperature and humidity, and more. Additionally, included in the prototype were 3 solenoid valves to individually control which plant was watered based on the specific soil moisture reading.
Also included in the design were 2 relay controlled 120VAC power outlets for external plant care systems such as a fan, light, or humidifier.
All of the data gathered from the sensors was automatically uploaded to a cloud database via the Raspberry Pi Zero controller. Events such as watering a specific plant or turning on/off one of the outlets was controlled via scheduled events.

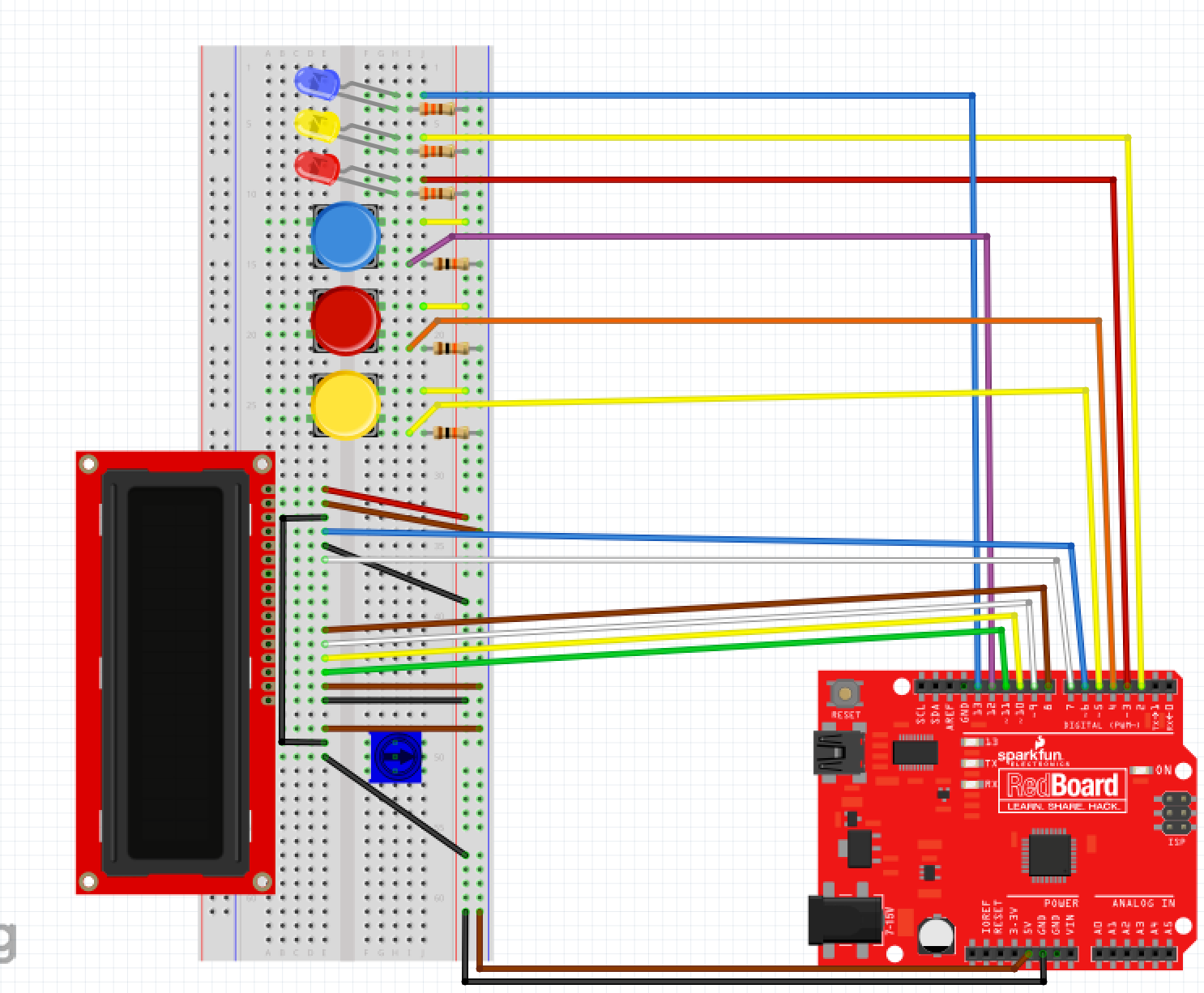
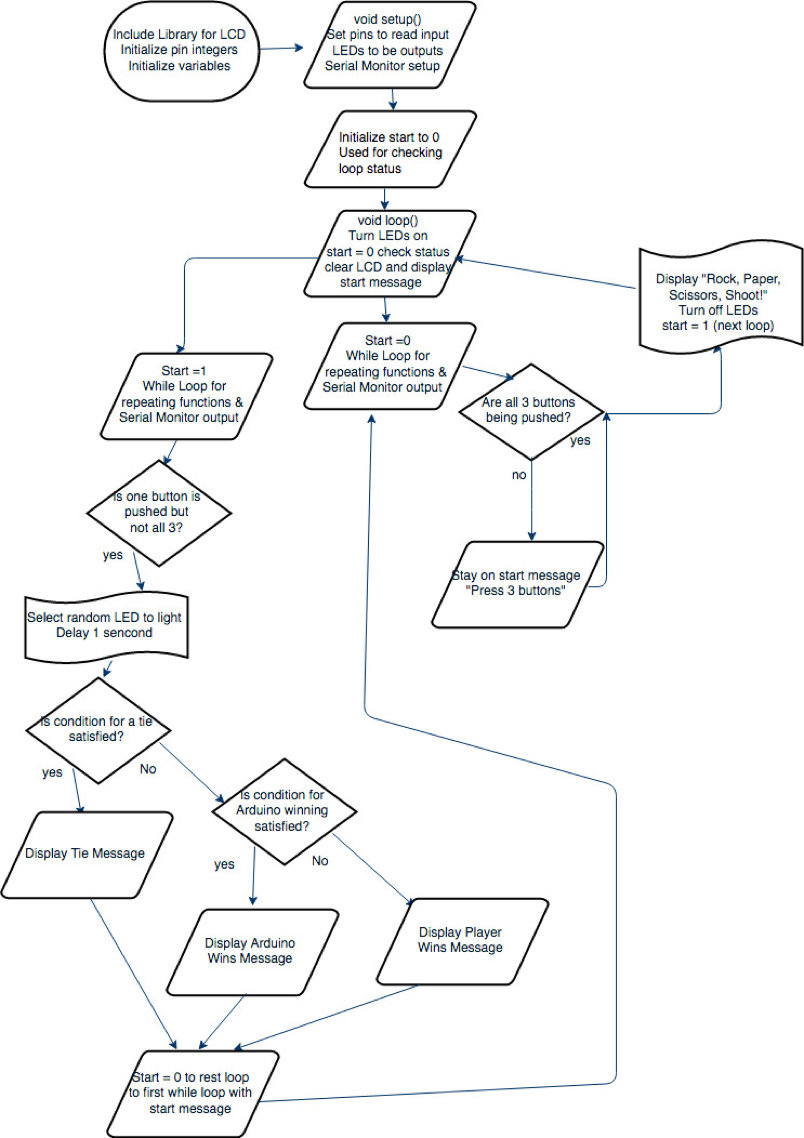
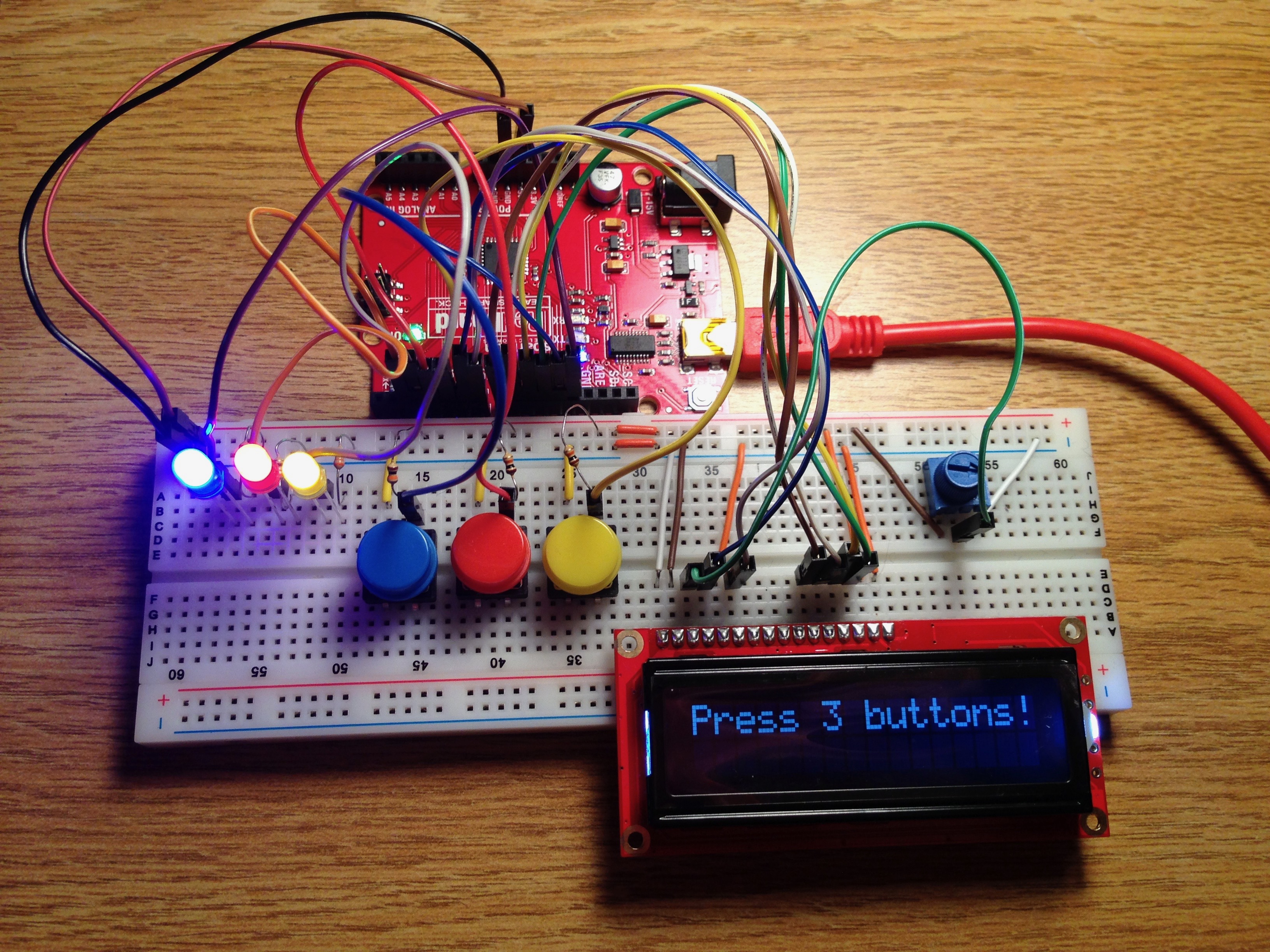
Arduino Rock, Paper, Scissors Decision Maker
For my introduction to engineering class, I decided to make a totally randomized Arduino Rock, Paper, Scissors decision maker to try to mitigate inherent bias and cheating when two people play the game.
The Fritzing diagram, code flow chart, and video were submitted as my final project in the class along with an accompanying report.
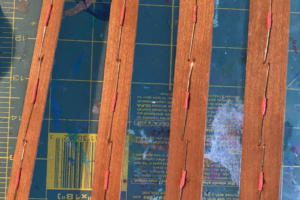
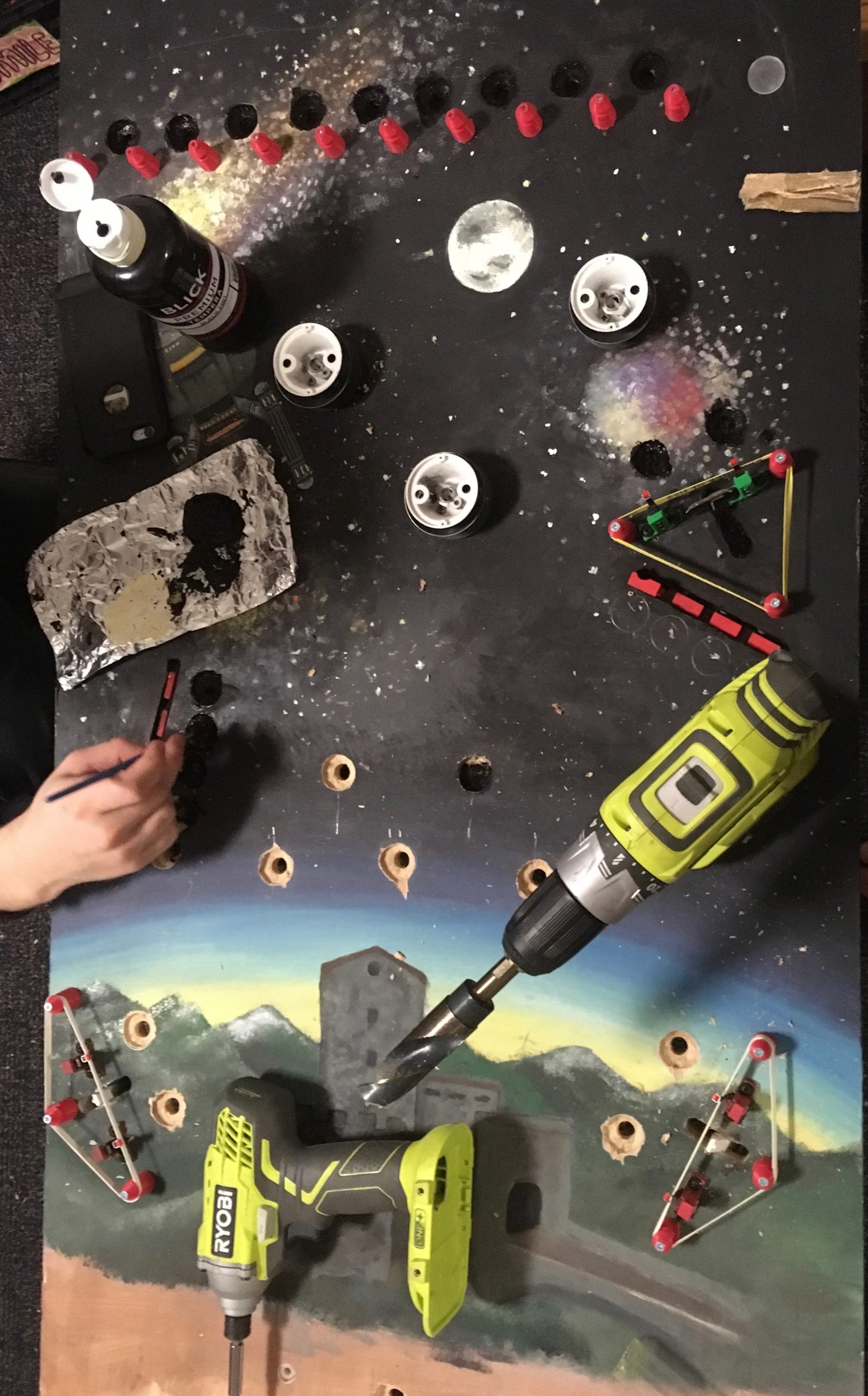
Custom Pinball Machine
My freshman year of college, one of my friends wanted to build a custom pinball machine from scratch. We started by designing the play-field and create a CAD design for the cabinet. We then bought the play-field components like solenoid powered pop-bumpers. We drilled out holes and then painted the play-field.
Although the project has stalled a bit due to space and time constraints, we plan to start it up again as soon as we are able. The next part of the project will be wiring up components and then writing code to control all the game play and scoring system.









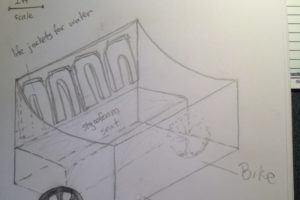


Baltimore Kinetic Sculpture Race
The American Visionary Art Museum in Baltimore, MD has held a Kinetic Sculpture Race for over 20 years. These vehicles are described as “amphibious, human powered works of art custom built for the race.” They range in complexity of engineering and artistic design and are mostly based off of bicycle components.
In 2014, when I was in 10th grade, some friends and I worked on a school supported kinetic sculpture, Name Your Game, to enter into the race. It was poorly executed, from the design chosen to the materials used. We got about 3/10th of a mile down the road before catastrophically breaking down (the race route is 15 miles long). However, not to be defeated by a broken sculpture, we pulled off pieces of the design and walked them a few more miles before the judges told us to stop. For our efforts, we were awarded the Golden Dinosaur Award for most spectacular failure.
Then in 2016, we tried again with the Roman themed, Wasn’t Built in a Day. This time, we made it a whole 3 miles before our main axle sheared in half from vibration stress and we had to call it a day.
After I graduated, my high school’s team was able to complete the race.
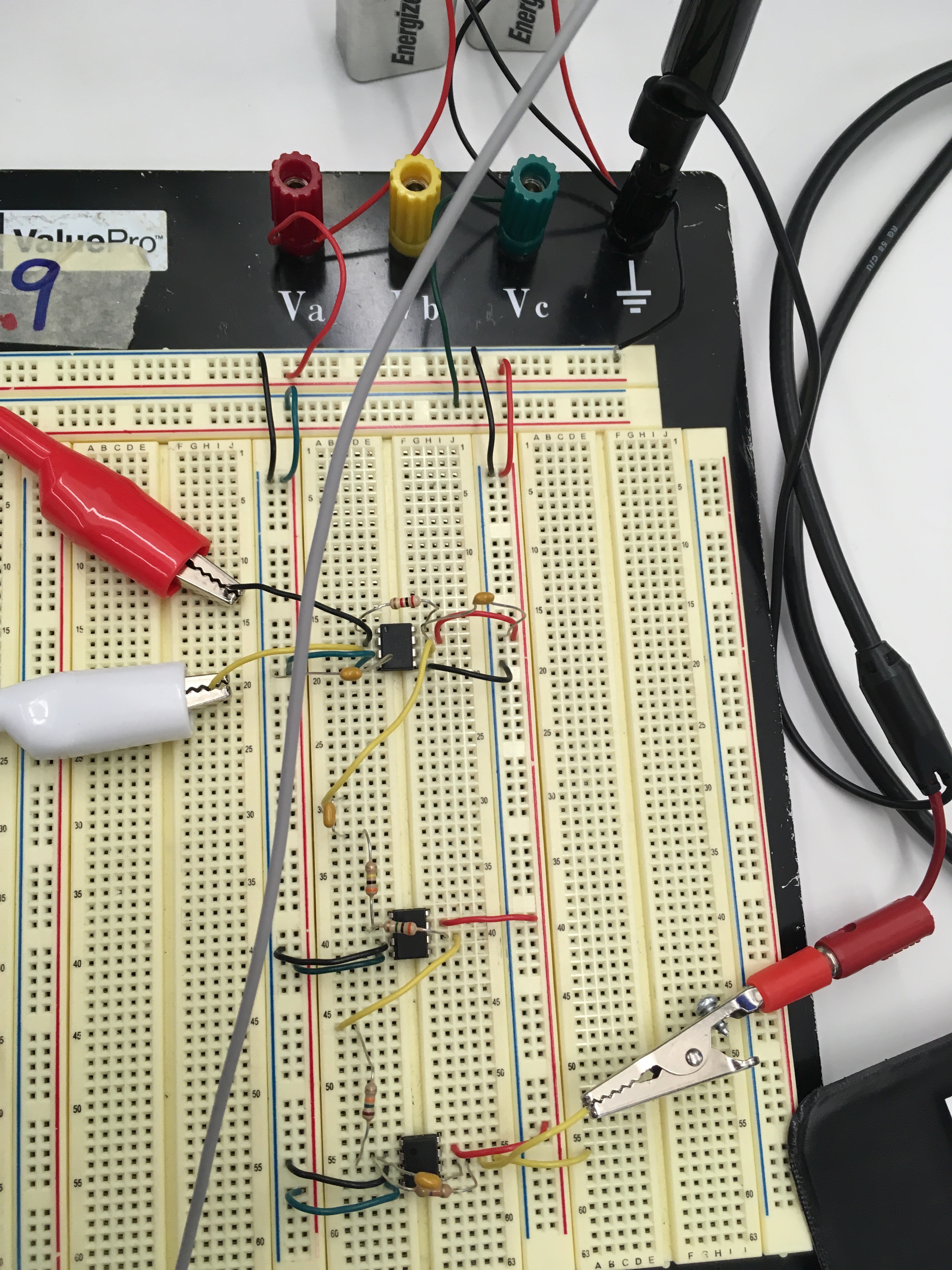
Instrumentation Amplifier Heart Rate Monitor
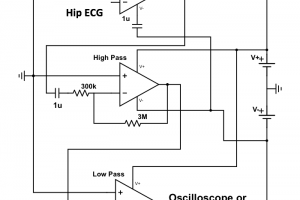
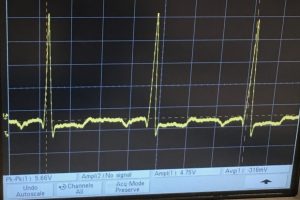
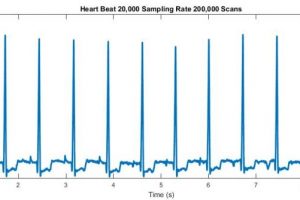
For my introduction to circuits class, at the culmination of our semester, my lab partner and I created a breadboard heart rate monitor. Our circuit used two operational amplifiers – one configured as a high pass filter and the other a low pass filter – and an instrumentation amplifier with the inputs from an electrode on the chest above the heart and one on the hip.
After modifying our circuit so that it read well on the oscilloscope, we imported our data into MATLAB for further analysis and some digital filtering.

Robotic Arm Simulink Retrieval System
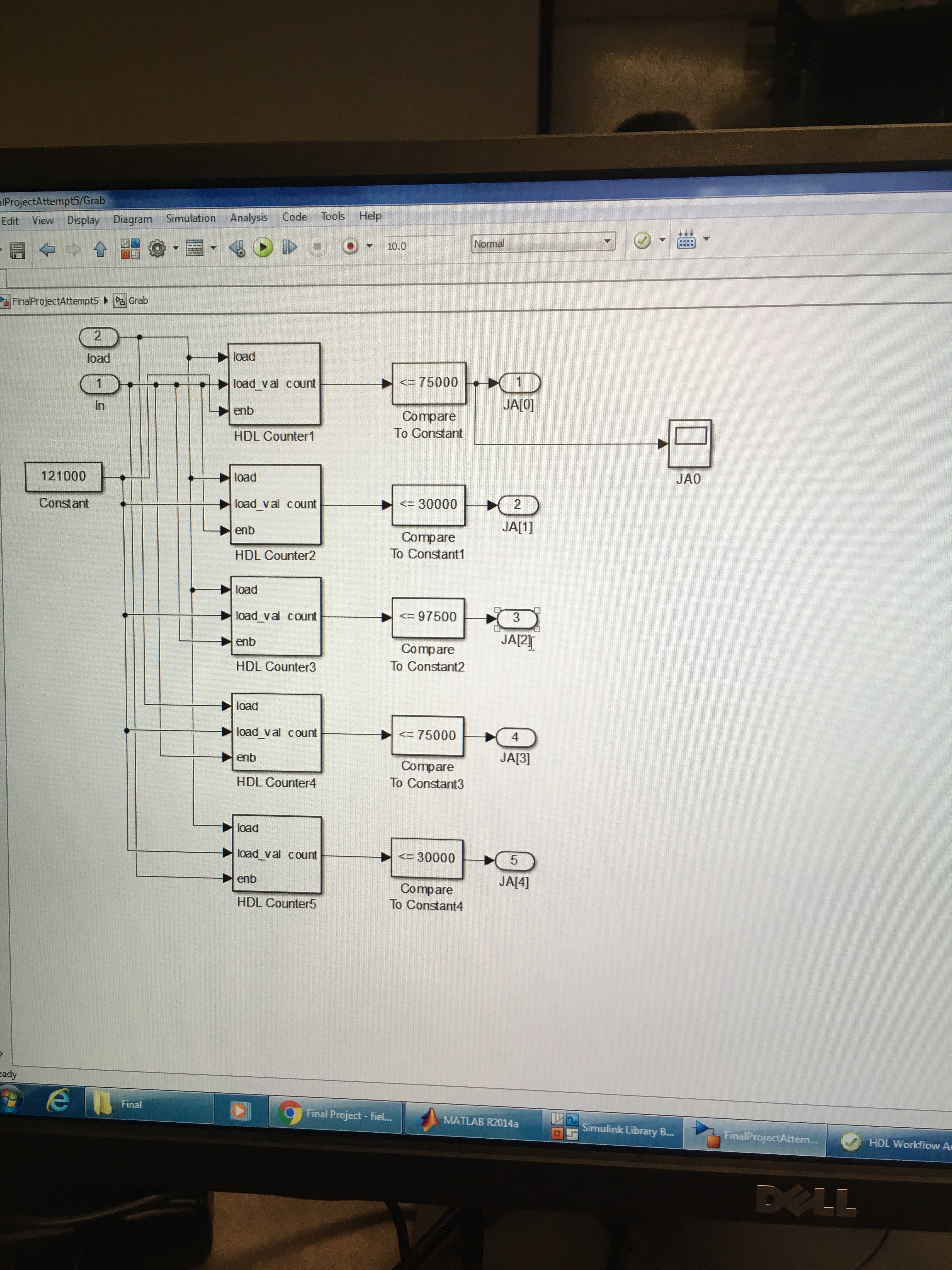
In my first embedded systems class, we used C++ and MATLAB’s Simulink to control the movement of a 5-joint robotic arm.
The task for the final project was to create a bottle retrieval system that was repeatable and consistently able to move the bottle clock-wise 90º.









Baltimore Kinetic Sculpture Race 2022
In May of 2022, my team and I successfully completed the American Visionary Art Museum’s Annual Kinetic Sculpture Race by biking our all-terrain human-powered sculpture through the 15-mile course, floating it in the Baltimore Harbor, and traversing mud and sand pits.
The theme for the year was ‘Time Warp’ and after brainstorming sessions, we ended up with an amalgamation idea where a dinosaur traveling through a portal from the Jurassic Age to ours discovers the joys of ‘old people candy’ and decides to stay despite the new fossilized form it finds itself in.
Check out more photos and information on the Baltimore Kinetic Sculpture Race website.